Décoder les signaux en quadrature d'un encodeur rotatif
Les encodeurs rotatifs sont des dispositifs électromécaniques qui convertissent la position angulaire d’un axe en signaux électriques. Les encodeurs optiques qui fonctionnent en quadrature proposent deux sorties A et B en décalage de phase (90°). Le nombre d’impulsions par tour de l’axe étant une caractéristique spécifique de l’encodeur, compter les impulsions donne une image du décalage angulaire (et le nombre d’impulsions par seconde donne une image de la vitesse de rotation). L’avance ou le retard de phase d’une sortie par rapport à l’autre renseigne sur le sens de rotation.
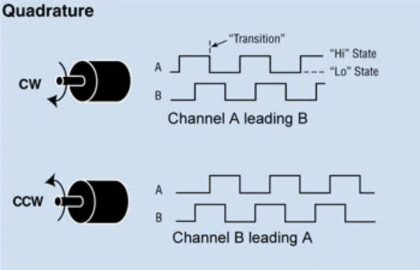 Sens de rotation horaire (ClockWise), signal A en avance de phase sur B. Sens de rotation antihoraire (CounterClockWise), signal B en avance de phase sur A
Sens de rotation horaire (ClockWise), signal A en avance de phase sur B. Sens de rotation antihoraire (CounterClockWise), signal B en avance de phase sur A
Dans ce projet, j’exploite ces signaux avec ma carte FPGA DE0-nano pour augmenter ou diminuer la valeur d’un compteur 8 bits selon le sens de rotation de l’axe de l’encodeur HW-040. Dans la vidéo ci-dessous, les 8 Leds sont l’image en binaire de la valeur de ce compteur :
On fournit les chronogrammes d’une simulation ci-dessous :
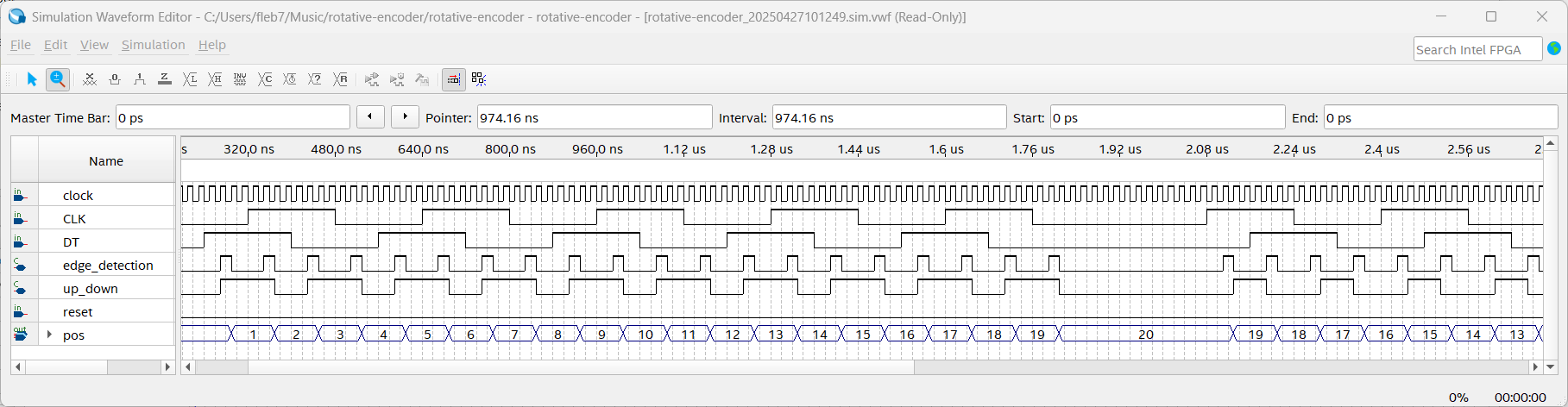 Simulation fonctionnelle avec les signaux DT et CLK en quadrature
Simulation fonctionnelle avec les signaux DT et CLK en quadrature
- clock : horloge du système ;
- CLK et DT : les signaux en quadrature simulés ;
- pos[7:0] : le compteur de position 8 bits. Dans la simulation il croît d’abord jusqu’à 20, puis décroît ;
- edge_detection : impulsion sur front montant ou descendant des signaux DT et CLK en quadrature. Tous les fronts sont repérés pour une meilleure résolution ;
- up_down : il faut regarder lorsque edge_detection est à l’état haut. up_down est à l’état haut ou à l’état bas selon le sens de rotation.
Le design du projet est le suivant (RTL view dans Intel Quartus Prime) :
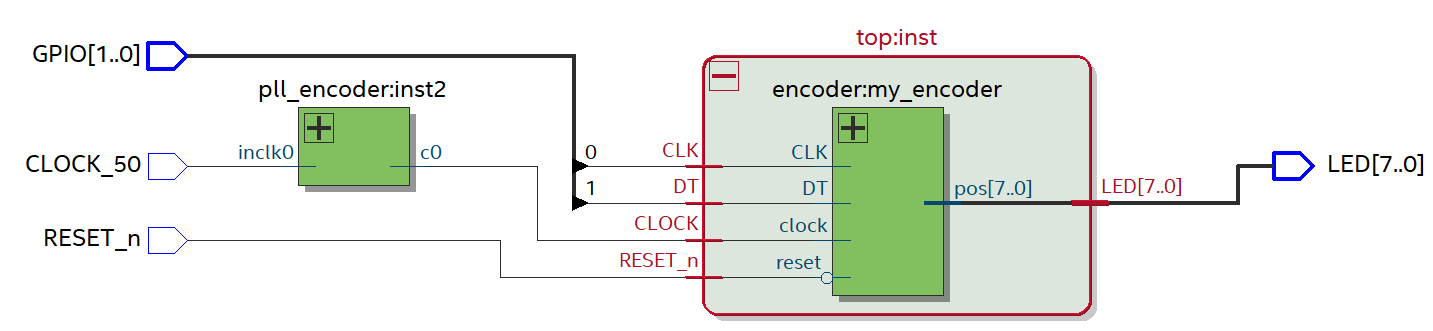
Un composant PLL (boucle à verrouillage de phase) est activé pour réduire la fréquence d’horloge de la carte (50MHz) à 10kHz. Un bouton Reset en surface de la carte permet de remettre le compteur de position à zéro. En sortie, les 8 Leds intégrées constitueront l’image en binaire de la valeur du compteur de position.
encoder.sv :
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
module encoder #(
parameter int WIDTH = 8
)
(
input logic clock, // horloge principale
input logic DT, CLK, // signaux de l'encodeur en quadrature
output logic [WIDTH-1:0] pos, // position (relative)
input reset // reset asynchrone, position=0
);
logic [2:0] chA, chB; // pipelines channelA, channelB
logic edge_detection; // détection de front
logic up_down; // avance ou retard de phase ?
always_ff @(posedge clock) begin
chA <= {chA[1:0], DT}; // channel A, pipeline signal DT
chB <= {chB[1:0], CLK}; // channel B, pipeline signal CLK
end
assign edge_detection = (chA[1] ^ chA[2]) || (chB[1] ^ chB[2]); // ^ : OU exclusif
assign up_down = chA[1] ^ chB[2];
always @(posedge clock or posedge reset) begin
if (reset) begin
pos <= 0;
end
else if (edge_detection) begin
pos <= up_down ? pos + 1 : pos - 1; // incrémentation ou décrémentation de la position
end
end
endmodule
top.sv :
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
module top #(
parameter int WIDTH = 8
)
(
input logic CLOCK,
input logic DT,
input logic CLK,
input logic RESET_n,
output logic [7:0] LED
);
logic [WIDTH-1:0] pos;
// Instanciation d'un encoder
encoder #(.WIDTH(WIDTH)) my_encoder (
.clock(CLOCK),
.DT(DT),
.CLK(CLK),
.reset(~RESET_n), // pull-up sur le bouton reset, actif sur niveau bas
.pos(pos)
);
assign LED = pos[7:0]; // compteur de position dirigé ves les 8 Leds
endmodule
Intel Quartus Prime Lite intègre un outil nommé Signal Tap Logic Analyser permettant d’implémenter un module supplémentaire dans votre projet qui va se connecter aux signaux souhaités et faire remonter les données vers le PC de développement par l’interface JTAG puis le câble USB. On pourra ainsi visualiser les signaux sur son ordinateur comme le ferait un analyseur logique connecté aux signaux de la puce FPGA.
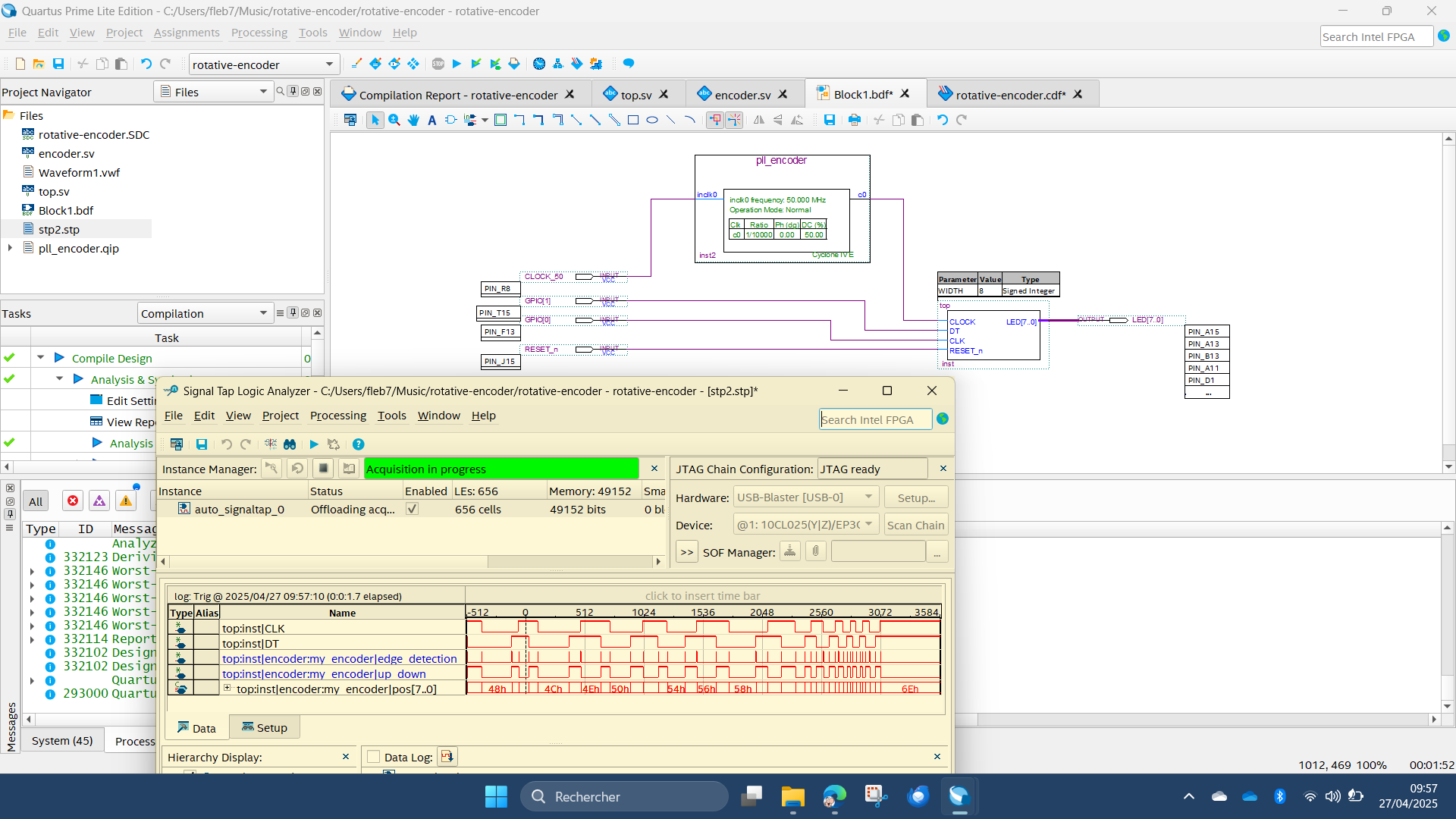 Analyseur logique intégré dans Quartus Prime
Analyseur logique intégré dans Quartus Prime